Fusion of UWB-Based Distance Sensors with a Visual Relative Localization System
1 Introduction
In recent years, the use of unmanned aerial vehicles (UAVs) has been rapidly growing due to their versatility and wide range of applications, from aerial photography and surveillance to delivery services 1 and search and rescue operations [6]. The problem of relative localization in UAV swarms is a critical challenge in enabling cooperative behavior and avoiding collisions.
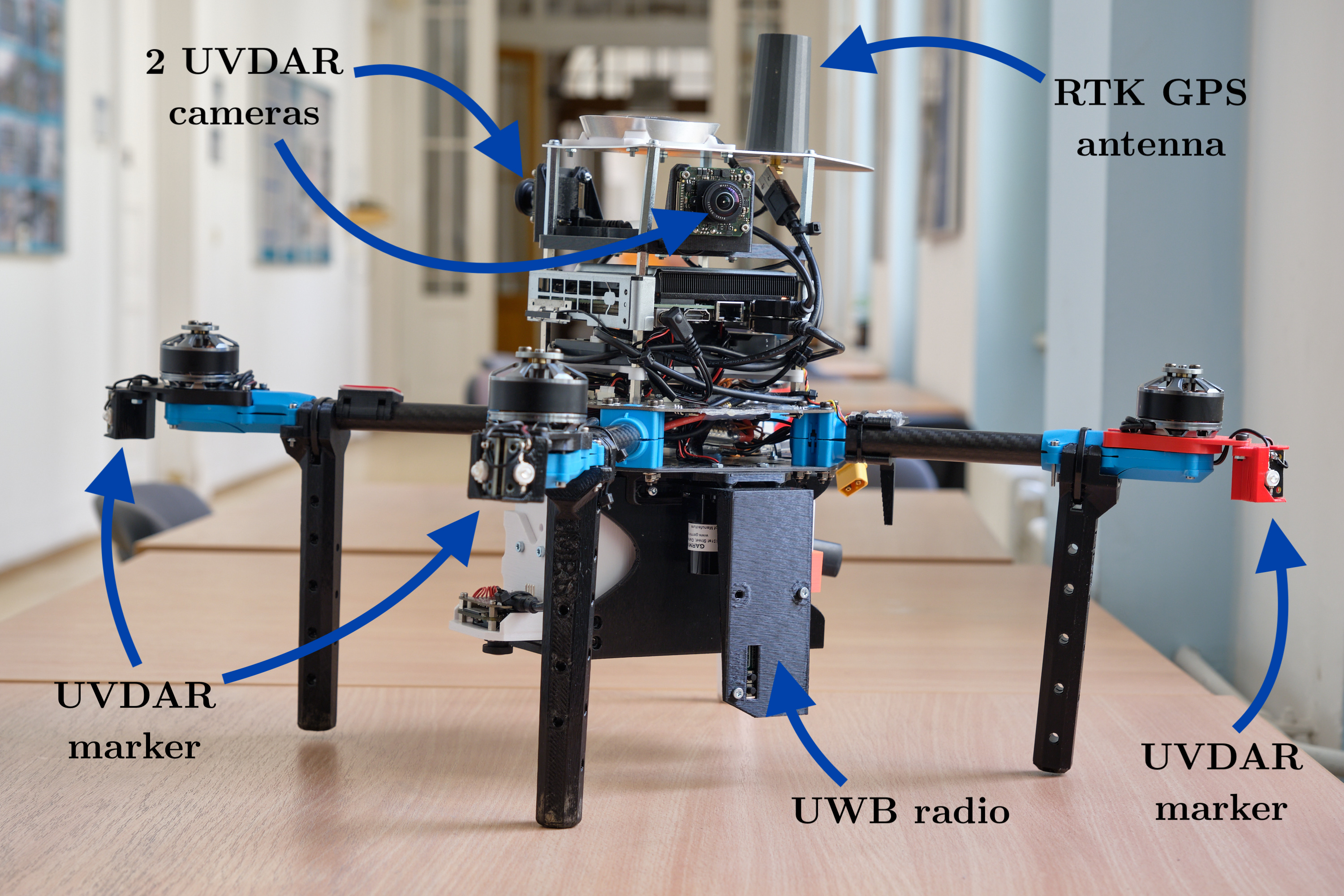
To address this problem, a novel system is proposed in this thesis that combines computer vision and ultra-wideband (UWB) technology for direction and range measurements, respectively. By combining these measurements with a Kalman filter, the relative positions and orientations of UAVs can be estimated with high accuracy, even in GNSS-denied environments such as buildings or underground areas [6]. This approach has a significant advantage over existing methods, which often rely on GNSS [10] or motion capture 2 and are therefore limited in their ability to operate in challenging environments or without additional infrastructure onsite.
This thesis addresses designing and implementing an effective relative localization system for UAV swarms using computer vision and UWB technology and evaluates how well it performs in real-world scenarios. First, a review of the proposed system and its key components, including the computer vision algorithms for direction estimation and the UWB hardware for range measurement, will be presented. Finally, the performance of the system will be evaluated through a series of experiments in both simulated and real-world environments.
By developing and testing this system, a contribution will be made to the growing body of research on multi-robot systems and pave the way for new applications of UAV swarms in challenging environments.
1.1 State of the art
Extensive research has already been conducted on the utilization of Ultra-Wideband (UWB) technology in Unmanned Aerial Vehicle (UAV) applications. Majority of published articles primarily concentrate on the implementation of UWB technology using an architecture based on UWB anchors [5,8]. Nevertheless, this particular implementation is unsuitable for deployment in potentially hazardous environments, particularly for search and rescue applications. Article Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial Swarm [11] proposes system architecture and the fusion algorithm, which combines visual-inertial odometry (VIO) and UWB ranging measurements in a tightly-coupled manner. However, this approach would be ineffective in environments lacking distinct features.
Hence, the subsequently proposed system stands out for its exceptional ease of deployment, accuracy of measurements and the robustness it offers.
1.2 Ranging and positioning in Civil Aviation
Along with the widely adopted localization and navigation via GNSS, aviation has developed several ranging and positioning solutions that can be analyzed and used to take a cue from for utilization in UAV applications.
Aircraft-to-Aircraft positioning
The aviation in general prides itself on a reputation of safe and well managed mean of transport with use of state-of-the-art equipment, procedures and training. Besides other safety related aspects, the aircraft-to-aircraft separation is a crucial when navigating the aircraft along the flight route from the very beginning of the flight till disembarking at the destination.
Development and incorporation of the Traffic Alert and Collision Avoidance System (TCAS) in the late 1980s into the aircraft systems serves as an effective solution to mitigate the risk of midair collisions between individual aircraft [9].
TCAS is a current implementation of the ICAO Airborne Collision Avoidance System (ACAS) technical standard and is a family of airborne devices that operate autonomously, independently from the ground-based air traffic control (ATC) and are designed to offer collision avoidance protection [3,9]. The concept of TCAS comprises of specialized TCAS computer unit and simultaneously takes advantage of already existing on-board equipment, the transponder of secondary surveillance radar installed on aircraft for ground ATC purposes and provides no protection against an aircraft, that does not possess an operating transponder [7].
Blood and packages delivery https://www.flyzipline.com↩︎
Motion capture OptiTrack https://optitrack.com↩︎